Arduino Project: Radar
In this project I will show you how to make an Arduino Radar yourself.
This is an intermediate/advanced project.
When your project is built it will show objects up to 50cm from the sensor. If you modify the code the radar can detect objects up to 5 meters.
For this project you will need two different programs Arduino IDE and Processing . The language Processing uses is java so keep that in mind.
Building and Wiring
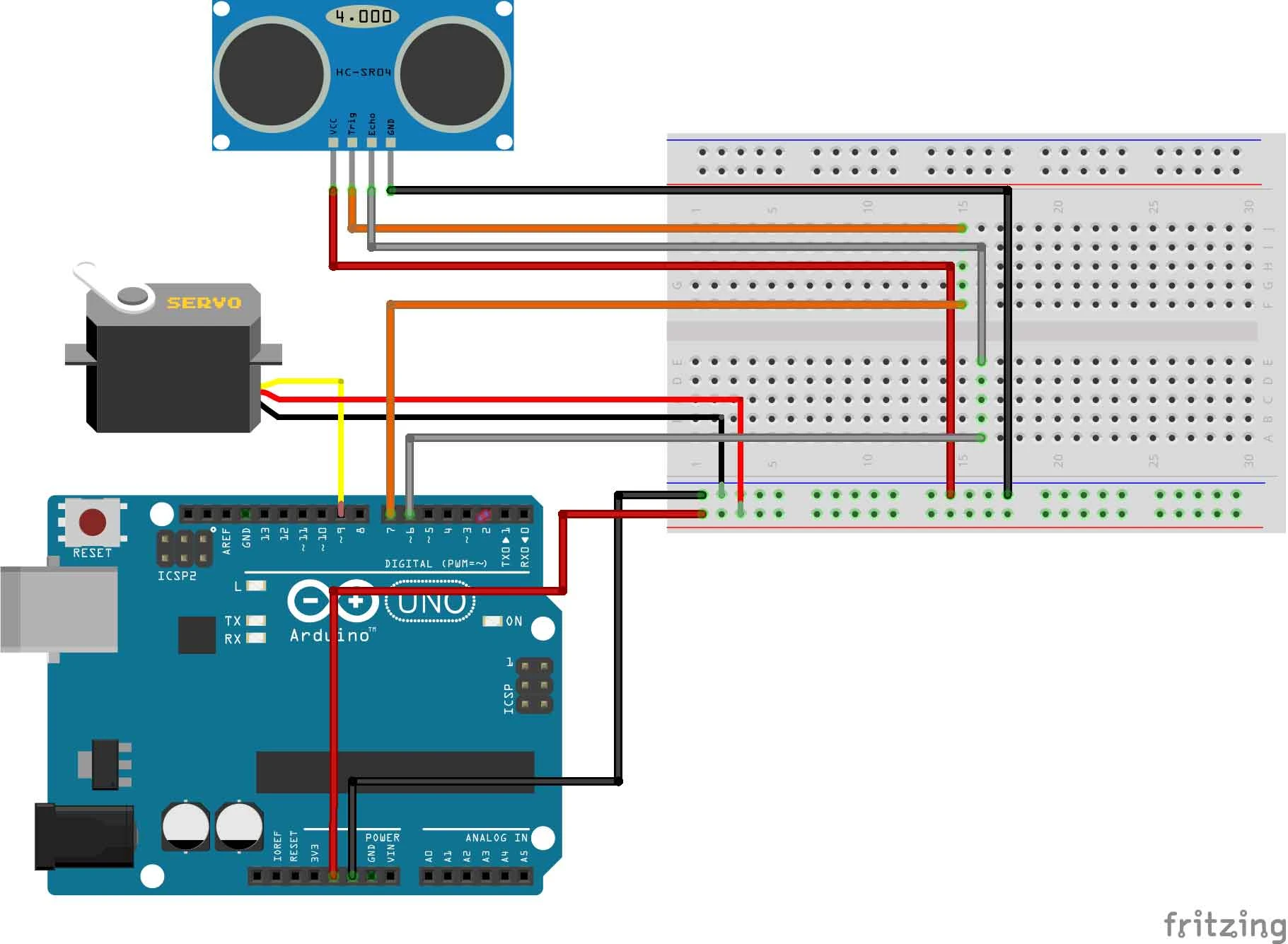
Now we're going to put the project together.
You start by sending the 5V from the Arduino to the breadboard. Then you go from the breadboard to the plus port of the servo and the sensor.
Once you have done that, go from the GND of the servo and sensor to the GND of the Arduino.
Finally, connect the servo control cable to pin 9, the echo pin to pin 6, and the trigger pin to pin 7.
Programming
leftRightServo.write(leftRightPos);
for (index = 0; index<=numReadings;index++) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
pulseTime = pulseIn(echoPin, HIGH);
distance = pulseTime/13;
total = total + distance;
delay(10);
}
average = total/numReadings;
if (index >= numReadings) {
index = 0;
total = 0;
}
if(average >= 300){
average = 300;
}
Serial.print(“X”);
Serial.print(leftRightPos);
Serial.print(“V”);
Serial.println(average);
}
for(leftRightPos = 180; leftRightPos > 0; leftRightPos–) {
leftRightServo.write(leftRightPos);
for (index = 0; index<=numReadings;index++) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
pulseTime = pulseIn(echoPin, HIGH);
distance = pulseTime/13;
total = total + distance;
delay(10);
}
average = total/numReadings;
if (index >= numReadings) {
index = 0;
total = 0;
}
if( average >= 300){
average = 300;
}
Serial.print(“X”);
Serial.print(leftRightPos);
Serial.print(“V”);
Serial.println(average);
}
}
import processing.serial.*;
Serial arduinoport;
float x, y;
int radius = 350;
int w = 300;
int degree = 0;
int value = 0;
int motion = 0;
int[] newValue = new int[181];
int[] oldValue = new int[181];
PFont myFont;
int radarDist = 0;
int firstRun = 0;
void setup(){
size(750, 450);
background (0);
myFont = createFont(“verdana”, 12);
textFont(myFont);
arduinoport = new Serial(this, “COM10”, 9600);
}
void draw(){
fill(0);
noStroke();
ellipse(radius, radius, 750, 750);
rectMode(CENTER);
rect(350,402,800,100);
if (degree >= 179) {
motion = 1;
}
if (degree <= 1) {
motion = 0;
}
strokeWeight(7);
if (motion == 0) {
for (int i = 0; i <= 20; i++) {
stroke(0, (10*i), 0);
line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w);
}
} else {
for (int i = 20; i >= 0; i–) {
stroke(0,200-(10*i), 0);
line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w);
}
}
noStroke();
fill(0,50,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*((oldValue[i]));
y = radius + sin(radians((180+i)))*((oldValue[i]));
vertex(x, y);
}
endShape();
fill(0,110,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*(newValue[i]);
y = radius + sin(radians((180+i)))*(newValue[i]);
vertex(x, y);
}
endShape();
fill(0,170,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*((newValue[i]+oldValue[i])/2);
y = radius + sin(radians((180+i)))*((newValue[i]+oldValue[i])/2);
vertex(x, y);
}
endShape();
if (firstRun >= 360) {
stroke(150,0,0);
strokeWeight(1);
noFill();
for (int i = 0; i < 180; i++) {
if (oldValue[i] – newValue[i] > 35 || newValue[i] – oldValue[i] > 35) {
x = radius + cos(radians((180+i)))*(newValue[i]);
y = radius + sin(radians((180+i)))*(newValue[i]);
ellipse(x, y, 10, 10);
}
}
}
for (int i = 0; i <= 5; i++){
noFill();
strokeWeight(1);
stroke(0, 255-(30*i), 0);
ellipse(radius, radius, (120*i), (120*i));
fill(0, 100, 0);
}
for (int i = 0; i <= 6; i++) {
strokeWeight(1);
stroke(0, 55, 0);
line(radius, radius, radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w);
fill(0, 55, 0);
noStroke();
if (180+(30*i) >= 300) {
text(Integer.toString(180+(30*i)), (radius+10) + cos(radians(180+(30*i)))*(w+10), (radius+10) + sin(radians(180+(30*i)))*(w+10), 25,50);
} else {
text(Integer.toString(180+(30*i)), radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w, 60,40);
}
}
noStroke();
fill(0);
rect(350,402,800,100);
fill(0, 100, 0);
text(“Degrees: “+Integer.toString(degree), 100, 380, 100, 50);
text(“Radar screen code “, 540, 380, 250, 50);
fill(0);
rect(70,60,150,100);
fill(0, 100, 0);
text(“Screen Key:”, 100, 50, 150, 50);
fill(0,50,0);
rect(30,53,10,10);
text(“First sweep”, 115, 70, 150, 50);
fill(0,110,0);
rect(30,73,10,10);
text(“Second sweep”, 115, 90, 150, 50);
fill(0,170,0);
rect(30,93,10,10);
text(“Average”, 115, 110, 150, 50);
fill(0, 255, 0);
text(“10”, 455, 375, 200, 200);
fill(0, 255, 0);
text(“20”, 455, 310, 200, 200);
fill(0, 255, 0);
text(“30”, 455, 250, 200, 200);
fill(0, 255, 0);
text(“40”, 455, 190, 200, 200);
fill(0, 255, 0);
text(“50”, 455, 130, 200, 200);
}
void serialEvent (Serial arduinoport) {
String xString = arduinoport.readStringUntil(‘\n’);
if (xString != null) {
xString = trim(xString);
String getX = xString.substring(1, xString.indexOf(“V”));
String getV = xString.substring(xString.indexOf(“V”)+1, xString.length());
degree = Integer.parseInt(getX);
value = Integer.parseInt(getV);
oldValue[degree] = newValue[degree];
newValue[degree] = value;
firstRun++;
if (firstRun > 330) {
firstRun = 333;
}
}
}