4.7 Ø
5101+ Bewertungen5101+ Bewertungen
Bestellen bis 16:00 Uhr für Versand am selben Tag
14 Tage Rückgabe
GB
DE
Privat
Geschäftlich

26/02/2025
Unterschiede zwischen Gleichstrommotoren und Schrittmotoren: Welchen soll man verwenden?
In diesem Artikel erfahren Sie die Unterschiede zwischen Gleichstrommotoren und Schrittmotoren. Motoren bilden die Grundlage unzähliger Anwendungen in der Elektronik, Robotik und Automatisierung. Egal ob Sie einen Roboter bauen, eine CNC-Maschine bedienen oder einen Ventilator antreiben: Die Wahl des richtigen Motors ist entscheidend. Wir erklären, wie die Motoren funktionieren, was ihre Vor- und Nachteile sind und welche Einsatzmöglichkeiten es gibt. So können Sie eine wohlüberlegte Auswahl für Ihr Vorhaben treffen.

Was ist ein Gleichstrommotor?
Ein Gleichstrommotor wandelt elektrische Energie in mechanische Energie um. Dieser Motor wird auch Gleichstrommotor genannt. Es funktioniert auf der Grundlage elektromagnetischer Prinzipien. Beim Anlegen einer Spannung fließt Strom durch die Spulen im Rotor. Dieses Feld arbeitet mit Permanent- oder Elektromagneten im Stator zusammen. Dadurch entsteht eine Kraft. Diese Kraft versetzt den Rotor in Bewegung. Der Motor läuft ständig. Dies geschieht, solange am Motor Spannung anliegt. Das Ergebnis ist eine konstante Rotation. Die Geschwindigkeit ist abhängig von der Spannung. Auch die Belastung des Motors spielt eine Rolle. Dies macht den Betrieb absolut robust.
Ein typischer Gleichstrommotor besteht aus zwei Hauptteilen. Der Stator ist geräuschlos und enthält die Magnete. Der Rotor dreht sich und enthält die Spulen. Bei herkömmlichen Motoren versorgen Kohlebürsten den Rotor mit Strom. Um die Drehung aufrechtzuerhalten, kehrt ein Kommutator regelmäßig die Stromrichtung um. Lager verringern die Reibung und sorgen für einen reibungslosen Betrieb. Diese Teile arbeiten immer sehr effizient zusammen.
Es gibt zwei Haupttypen von Gleichstrommotoren. Der erste Typ ist der Bürstenmotor. Dieser Motor verfügt über eine einfache Steuerung mit Gleichspannung. Es ist günstig und weit verbreitet. Bürstenmotoren erreichen hohe Drehzahlen. Sie werden in Spielzeugen und Ventilatoren verwendet. Nachteilig ist der durch die Reibung entstehende Verschleiß der Kohlebürsten. Dies erfordert zusätzlichen Wartungsaufwand. Der zweite Typ ist der bürstenlose Motor. Dieser Motortyp wird auch BLDC genannt. Es besitzt keine Kohlebürsten und ist dadurch langlebiger. Der bürstenlose Motor arbeitet effizienter und erzeugt weniger Wärme. Es bietet eine bessere Drehmomentkontrolle. Allerdings ist die Steuerung komplexer. Hierzu ist eine spezielle elektronische Steuerung erforderlich. Dadurch ist dieser Motor grundsätzlich teurer als der Bürstenmotor. Beide Typen haben ihre eigenen Vor- und Nachteile. Jeder Motortyp passt perfekt zu verschiedenen Situationen und Anwendungen.
Gleichstrommotoren werden in vielen Anwendungen eingesetzt. Dieser Motor wird häufig in Lüftern und Pumpen eingesetzt. Denken Sie an Computerkühler und Klimaanlagen. Es wird auch zum Antrieb von Werkzeugen wie Bohrern und Schleifmaschinen verwendet. In der Industrie sorgen Motoren für stabile Bewegung. Förderbänder laufen reibungslos. Im Modellbau und in der Spielwarenbranche kommen sie in Elektroautos und Drohnen zum Einsatz. Sie bieten Einfachheit und Geschwindigkeit. Ihre Leistungen werden hoch geschätzt.

Was ist ein Schrittmotor?
Ein Schrittmotor funktioniert anders als ein Gleichstrommotor. Anstatt sich ständig zu drehen, bewegt sich der Rotor in festen Schritten. Dadurch eignet sich der Motor optimal für Anwendungen, die eine präzise Positionierung erfordern. Der Motor besteht aus einem Stator mit mehreren Spulen und einem Rotor. Die Spulen werden in einer bestimmten Reihenfolge bestromt. Dadurch wird eine schrittweise Bewegung des Rotors bewirkt. Die Schrittweite wird häufig in Grad angegeben, beispielsweise 1,8° pro Schritt. Mikroschritte können die Präzision verbessern, indem sie kleinere Schritte ermöglichen. Es gibt zwei Varianten von Schrittmotoren.
Der Unipolarmotor ist durch zentrale Abgriffe pro Spule einfacher zu steuern. Dadurch wird der Motor zwar günstiger, das Drehmoment ist jedoch oft geringer und der Wirkungsgrad nicht optimal.
Der bipolare Motor hat ein höheres Drehmoment und einen höheren Wirkungsgrad, die Steuerung ist jedoch komplexer. Dies erfordert einen Treiber und eine H-Brücke, was bedeutet, dass mehr Kenntnisse im Bereich Elektronik erforderlich sind.
Schrittmotoren bieten mehrere Vorteile. Sie ermöglichen präzise und wiederholbare Bewegungen, die für Anwendungen wie 3D-Drucker und CNC-Maschinen nützlich sind. Diese Motoren behalten ihr Drehmoment im Stillstand, wodurch Bremssysteme überflüssig werden. Oft ist eine offene Regelung möglich, wodurch eine externe Rückkopplung überflüssig wird. Zu den Nachteilen zählen die begrenzte Geschwindigkeit (weniger als 2000 U/min) und der Drehmomentabfall bei hohen Geschwindigkeiten, was zu Schrittverlusten führen kann. Darüber hinaus verbrauchen sie ständig Strom, auch im Stillstand.
Schrittmotoren finden in vielen Bereichen Anwendung. Denken Sie an 3D-Drucker und an die Positionierung von Druckkopf und Druckbett. In CNC-Maschinen und Graviermaschinen werden sie verwendet, um präzise Schnitte durchzuführen. In der Robotik wird der Motor für wiederholbare Bewegungen genutzt. Kamera- und Teleskopsysteme benötigen sie für sanfte Bewegungen und die Verfolgung von Objekten. Präzisionsinstrumente, beispielsweise in der Medizintechnik, nutzen Schrittmotoren für präzise Bewegungen ohne externe Rückmeldung.




Vergleich zwischen Gleichstrommotoren und Schrittmotoren
Beide Motortypen haben ihre eigenen Stärken. Nachfolgend vergleichen wir die wichtigsten Funktionen:
Präzision und Kontrolle
- Gleichstrommotor:
- Läuft kontinuierlich und ist für eine genaue Positionsbestimmung weniger geeignet.
- Zur genauen Positionierung sind Zusatzgeräte wie beispielsweise Encoder erforderlich.
- Schrittmotor:
- Bewegt sich in diskreten Schritten, wodurch sehr präzise Positionen erreicht werden können.
- Kann sogar extrafeine Schritte mit Mikroschritten ausführen, ohne externes Feedback.
Geschwindigkeit und Drehmoment
- Gleichstrommotor:
- Kann hohe Geschwindigkeiten von bis zu 10.000 U/min erreichen.
- Geeignet für Anwendungen, bei denen Geschwindigkeit und variables Drehmoment wichtig sind.
- Schrittmotor:
- Begrenzt auf niedrigere Geschwindigkeiten (oft unter 2000 U/min).
- Bietet ein stabiles Drehmoment im Stillstand, verliert dieses Drehmoment jedoch bei höheren Geschwindigkeiten.
Energieverbrauch und -effizienz
- Gleichstrommotor:
- Insbesondere bürstenlose Gleichstrommotoren haben einen hohen Wirkungsgrad.
- Verbraucht im Stand keine Energie.
- Schrittmotor:
- Verbraucht ständig Strom, auch wenn der Motor nicht läuft.
- Dies kann insbesondere bei längeren Stillstandszeiten zu einem erhöhten Energieverbrauch führen.
Kontrolle und Komplexität
- Gleichstrommotor:
- Einfache Steuerung mit variabler Spannung oder Pulsweitenmodulation (PWM).
- Mit einer H-Brücke lässt sich die Drehrichtung oft problemlos umkehren.
- Schrittmotor:
- Erfordert einen speziellen Treiber, der die Spulen in der richtigen Reihenfolge aktiviert.
- Die Steuerung ist komplexer und erfordert eine präzise Pulskontrolle.
Lebensdauer und Verschleiß
- Gleichstrommotor:
- Aufgrund der Abnutzung der Kohlebürsten kann die Lebensdauer herkömmlicher Bürstenmotoren verkürzt werden.
- Bürstenlose Varianten bieten eine längere Lebensdauer.
- Schrittmotor:
- Da sie keine Bürsten haben, ist der Verschleiß im Allgemeinen minimal.
- Bei sachgemäßer Anwendung für den dauerhaften und zuverlässigen Einsatz geeignet.
Einsatzgebiete: Wann wählt man welchen Motor?
Die Wahl zwischen einem Gleichstrommotor und einem Schrittmotor hängt von den spezifischen Anforderungen Ihres Projekts ab. Nachfolgend finden Sie eine praktische Anleitung:
Wählen Sie einen Gleichstrommotor, wenn Sie:
- Benötigen hohe Geschwindigkeiten und kontinuierliche Rotation: Zum Beispiel für Ventilatoren, Elektrofahrzeuge oder Förderbänder.
- Einfache Ansteuerung ist wichtig: Mit minimalen elektronischen Bauteilen und einfacher PWM-Steuerung.
- Kosteneffizienz und breite Verfügbarkeit sind entscheidend: Gleichstrommotoren sind oft günstiger und leichter zu beschaffen.
- Auf eine exakte Positionierung kommt es weniger an: Hier genügt eine konstante, schnelle Rotation.
Wählen Sie einen Schrittmotor, wenn Sie:
- Hochpräzise Positionierung und wiederholbare Bewegungen sind erforderlich: Dies ist wichtig für 3D-Drucker, CNC-Maschinen, Roboterarme und Präzisionsinstrumente.
- Bewegungen in diskreten Schritten oder exakten Winkeln sind erforderlich: dank fixer Schrittweiten und der Möglichkeit zum Mikroschritt.
- Eine offene Regelung ohne komplexe externe Sensoren ist wünschenswert: Dies vereinfacht die Steuerung für Anwendungen, die nicht auf Rückmeldung angewiesen sind.
- Wichtig ist ein stabiles Drehmoment im Stillstand: Ohne dass zusätzliche Bremsmechanismen nötig sind.
Steuerung der Motoren
Für die optimale Nutzung sowohl von Gleichstrommotoren als auch von Schrittmotoren ist die richtige Steuerung von entscheidender Bedeutung.
Steuerung von Gleichstrommotoren:
- Direktsteuerung: Der Motor wird direkt an eine Spannungsquelle angeschlossen. Dies ist einfach, bietet aber nur wenige Steuerungsmöglichkeiten.
- Pulsweitenmodulation (PWM): PWM ermöglicht eine präzise Steuerung der Motordrehzahl. Die Spannung wird schnell ein- und ausgeschaltet, so dass eine Durchschnittsspannung entsteht.
- H-Brückenschaltung: Damit lässt sich die Drehrichtung des Motors einfach umkehren. Dies ist bei Anwendungen nützlich, bei denen sowohl Geschwindigkeit als auch Richtung wichtig sind.
Schrittmotoren steuern:
- Spezifische Treiber: Der Treiber sorgt dafür, dass die Spulen in der richtigen Reihenfolge bestromt werden. Dies ist für eine reibungslose und präzise Bewegung unbedingt erforderlich.
- Vollschritte und Halbschritte: Bei Vollschritten bewegt sich der Motor in einem festen Winkel (zum Beispiel 1,8°). Halbe Schritte verdoppeln die Auflösung.
- Microstepping: Diese Technik ermöglicht es, die Bewegung in noch kleinere Schritte zu unterteilen. Dadurch wird eine sehr gleichmäßige und präzise Bewegung erreicht. Dies ist ideal für Anwendungen, die maximale Genauigkeit erfordern.
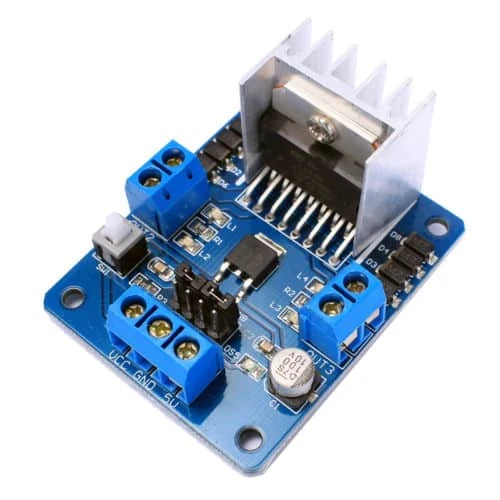
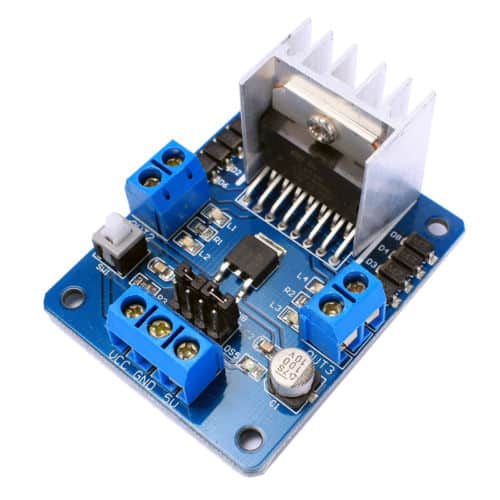
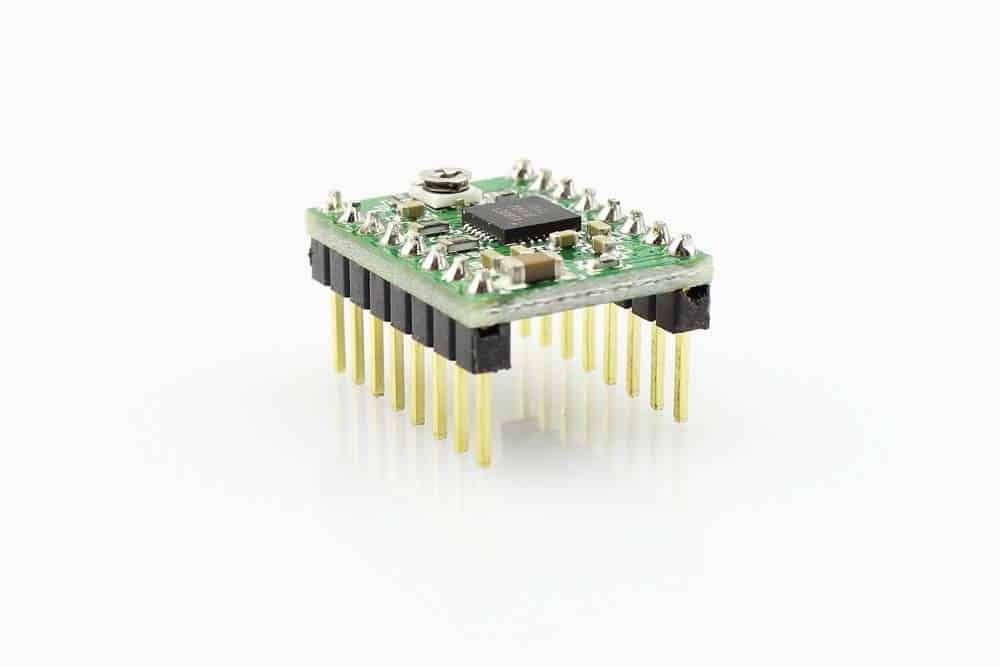
Zu den beliebten Schrittmotortreibern gehören A4988, DRV8825, TMC2209 und TB6600. Für Gleichstrommotoren stehen außerdem verschiedene Treiber wie L298N, DRV8871 und TB6612FNG zur Verfügung.
Häufige Fehler und praktische Tipps
Unabhängig davon, für welchen Motortyp Sie sich entscheiden, können zahlreiche Fallstricke auftreten. Hier sind einige Tipps, um Probleme zu vermeiden:
Für Gleichstrommotoren:
- Unzureichende Stromversorgung: Stellen Sie sicher, dass die Stromversorgung ausreichend Spannung und Strom liefert. Dadurch kann der Motor mit der richtigen Drehzahl laufen.
- Schutz vor Stromstößen: Verwendung von Freilaufdioden (z.B. 1N4007). Dies schützt den Fahrer vor Spannungsspitzen beim Anfahren und Anhalten.
- Optimale PWM-Einstellungen: Experimentieren Sie mit verschiedenen Frequenzen. Beispielsweise zwischen 1 kHz und 20 kHz für einen stabilen Motorbetrieb.
- Kühlung: Überwachen Sie die Temperatur und verwenden Sie bei Bedarf Kühlkörper oder Lüfter, um eine Überhitzung zu vermeiden.
Für Schrittmotoren:
- Richtige Stromeinstellung: Stellen Sie die Strombegrenzung genau gemäß dem Datenblatt von Motor und Treiber ein. Ein zu hoher oder zu niedriger Strom kann die Leistung beeinträchtigen.
- Stabile Stromversorgung: Stellen Sie sicher, dass Sie eine zum Motor passende Stromversorgung haben (häufig zwischen 12 V und 24 V), um unerwartete Resets zu vermeiden.
- Einsatz von Mikroschritten: Dies hilft, Vibrationen zu reduzieren und die Bewegung sanfter zu gestalten.
- Verkabelung prüfen: Falsch verkabelte Spulen können zu unregelmäßigen Bewegungen führen. Überprüfen Sie die Verkabelung stets sorgfältig.
- Kontrollierte Beschleunigung: Beim Starten eines Schrittmotors ist es wichtig, die Geschwindigkeit allmählich aufzubauen, um zu vermeiden, dass Schritte verloren gehen.
- Endschalter: In Systemen wie CNC-Maschinen oder Roboterarmen können Endschalter Schäden verhindern. Diese Schalter stoppen den Motor, wenn er die mechanischen Grenzen erreicht.

Fazit: Welcher Motor passt zu Ihrem Vorhaben?
Die Wahl zwischen einem Gleichstrommotor und einem Schrittmotor hängt von den Anforderungen Ihres Projekts ab.
- Wenn Ihnen Geschwindigkeit und einfache Steuerung wichtig sind. Dann wählen Sie einen Gleichstrommotor. Diese Motoren sind ideal für Anwendungen wie Ventilatoren, Elektrofahrzeuge, Förderbänder und Elektrowerkzeuge.
- Wenn es auf Genauigkeit und wiederholbare Bewegungen ankommt. Wählen Sie dann einen Schrittmotor. Dank der diskreten Schrittbewegungen und der Mikroschrittfunktion eignen sich diese Motoren perfekt für 3D-Drucker, CNC-Maschinen und Roboter.
Es ist wichtig, die Spezifikationen Ihres Projekts sorgfältig zu analysieren. Testen Sie den Motor in einem Prototyp, lesen Sie die Datenblätter und prüfen Sie, ob die Stromversorgung und Kühlung ausreichend sind. Mit dem richtigen Wissen und der richtigen Ausrüstung können Sie den Motor auswählen, der am besten zu Ihrem Einsatzzweck passt.
Dabei spielt es keine Rolle, ob Sie Hobbybastler oder professioneller Ingenieur sind. Die Welt der Motorräder bietet viele Möglichkeiten. Mit einer wohlüberlegten Auswahl legen Sie den Grundstein für den Erfolg jedes Elektronik-, Roboter- oder Automatisierungsprojekts.
Verwandte Artikel
